近日,我院卢军强教授联合西湖大学姜汉卿教授和王蕾教授,基于折纸工艺利用可降解纤维素薄膜开发了一种可持续性闭环控制机器人系统,相关研究工作以“Biodegradable Origami Enables Closed-Loop Sustainable Robotic Systems” 为题发表于Science Advances。西湖大学为该文第一署名单位,我院卢军强教授为该文第一共同通讯作者。

论文链接:https://www.science.org/doi/10.1126/sciadv.ads0217
以ChatGPT、DeepSeek等为代表的大语言模型,标志着通用人工智能研究迈出了关键一步。下一步,更为重要的是赋予这些大语言模型与人类相似的感知世界的能力,使其能够跟人类一样直接从现实世界中学习。在这一进程中,软体人形机器人将扮演不可或缺的角色,成为实现这一目标的核心技术。目前,基于化学合成的橡胶态软材料由于其较好的成型性、弹性、稳定性以及多功能性,成为软体机器人构筑用材料的主要选择。然而,这些橡胶态软材料的制备过程通常涉及对环境有害的有机溶剂或者产生无法降解的产物,对于机器人领域的可持续发展产生严重的负面影响。为了解决机器人制备过程中对于环境的负面影响,研究者们开始开发可回收或可降解凝胶用于构筑软体机器人,但是所构筑的软体机器人通常只具有单一的驱动或传感功能,并且由于凝胶材料力学性能的限制,所构筑的机器人的性能通常较差。因此,亟需开发一种基于力学稳定可持续性材料的新型机器人结构,实现具有全机器人功能的可靠、可持续以及可降解的软体机器人系统。
为了解决上述难题,该研究将可生物降解纤维素薄膜与可变形折纸技术结合,辅以同样可生物降解的明胶离子凝胶,提出了一种构筑可持续和可生物降解的模块化自感知折纸机器人的新方法。这种方法可以为高塑性材料和软体机器人应用场景之间架起一座桥梁,有望进一步推动高强度塑性材料在软体机器人领域的应用。如图1所示,可持续折纸机器人模块由甘油增塑的纤维素薄膜、3D打印固定板以及明胶基离子凝胶传感器组成。纤维素折纸与明胶基凝胶分别利用水系溶剂体系进行制备,两者的合成过程均不使用任何环境不友好的有机溶剂,构筑机器人系统过程的可持续性显著提升。利用该方法构筑的可持续性软体机器人系统同时实现生态循环(生长-加工-降解)和机器人功能(驱动-传感-交互)闭环。
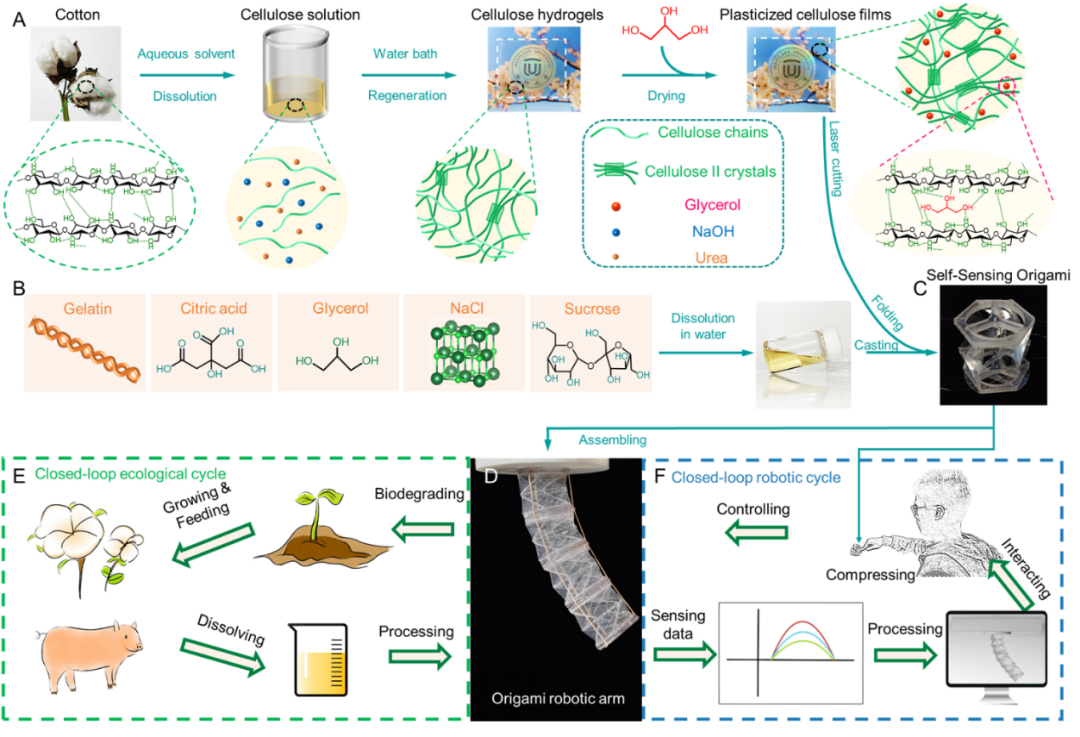
▲ 图1. 可持续性折纸机器人系统的构筑方法



